
Freshly launched content! We'll be adding more on a regular basis.
Question, comment or suggestion?Control Systems Tag

This article will help you understand proportional, integral, and derivative control (PID ...
This article will help you understand proportional, integral, and derivative control (PID control) and how it contributes to the efficiency of ...
This article will help you understand proportional, integral, and derivative control (PID control) and how it contributes to the efficiency of control systems. With sample ...
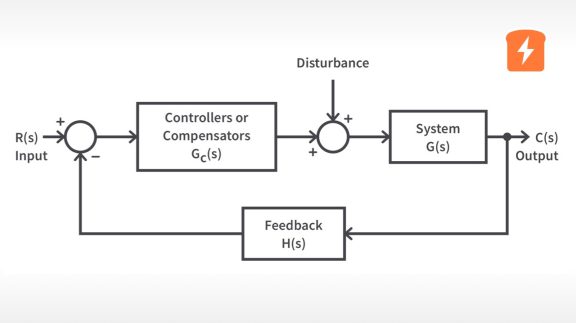
The article presents an in-depth understanding of controllers and compensators' tasks in ...
The article presents an in-depth understanding of controllers and compensators' tasks in control systems, and the impact adding a pole or zero on a ...
The article presents an in-depth understanding of controllers and compensators' tasks in control systems, and the impact adding a pole or zero on a system response can make. It ...

This article provides an in-depth understanding of the root locus plot in control systems and ...
This article provides an in-depth understanding of the root locus plot in control systems and outlines how to create one using Scilab.
This article provides an in-depth understanding of the root locus plot in control systems and outlines how to create one using Scilab.

This tutorial explains how to apply the Routh Hurwitz Criterion for the stability of control ...
This tutorial explains how to apply the Routh Hurwitz Criterion for the stability of control systems and provides a practical overview of computing ...
This tutorial explains how to apply the Routh Hurwitz Criterion for the stability of control systems and provides a practical overview of computing the Routh Array in Scilab.

This article reveals how the Routh-Hurwitz Criterion contributes to the stability of Control ...
This article reveals how the Routh-Hurwitz Criterion contributes to the stability of Control Systems. Offers a deep dive into the formation and usage ...
This article reveals how the Routh-Hurwitz Criterion contributes to the stability of Control Systems. Offers a deep dive into the formation and usage of Routh Array.

Dive into the core concept of Control Systems Stability, learning about BIBO Stability and ...
Dive into the core concept of Control Systems Stability, learning about BIBO Stability and Transfer Function. An engaging example of a marble in a ...
Dive into the core concept of Control Systems Stability, learning about BIBO Stability and Transfer Function. An engaging example of a marble in a bowl helps illustrate the ...

This article provides a brief introduction to steady state error , trying out the Final Value ...
This article provides a brief introduction to steady state error , trying out the Final Value Theorem of the responses and checked when the final ...
This article provides a brief introduction to steady state error , trying out the Final Value Theorem of the responses and checked when the final value exists for a specific ...

The tutorial provides a comprehensive overview of time response specifications in control ...
The tutorial provides a comprehensive overview of time response specifications in control systems with a focus on underdamped systems. Highlights ...
The tutorial provides a comprehensive overview of time response specifications in control systems with a focus on underdamped systems. Highlights include the step responses, delay ...
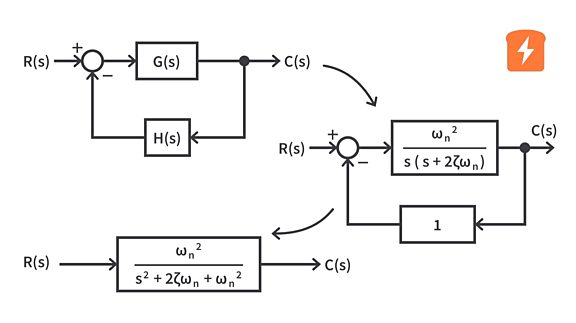
This article provides a comprehensive guide to understanding Second-Order Systems in Control ...
This article provides a comprehensive guide to understanding Second-Order Systems in Control Systems. It explains the System Damping Ratio and system ...
This article provides a comprehensive guide to understanding Second-Order Systems in Control Systems. It explains the System Damping Ratio and system Damping Frequency, uses an ...

The article offers a detailed insight into First Order Systems within Control Systems. ...
The article offers a detailed insight into First Order Systems within Control Systems. Covering aspects such as Time Response and Laplace Transform, ...
The article offers a detailed insight into First Order Systems within Control Systems. Covering aspects such as Time Response and Laplace Transform, enhancing the reader's ...
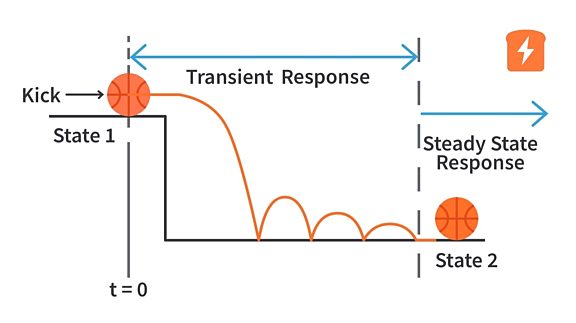
The tutorial provides a detailed analysis of Time Response Analysis within Control Systems. It ...
The tutorial provides a detailed analysis of Time Response Analysis within Control Systems. It stresses understanding Transient and Steady State ...
The tutorial provides a detailed analysis of Time Response Analysis within Control Systems. It stresses understanding Transient and Steady State Responses and the importance of ...
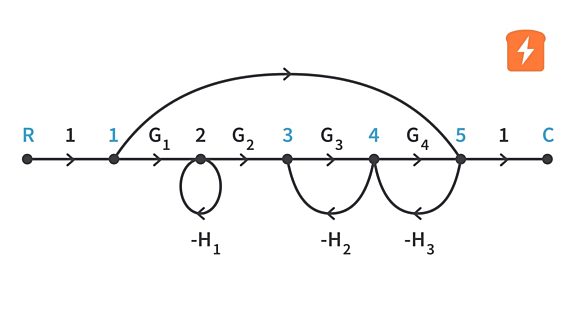
This article provides a comprehensive Control Systems techniques: Mason’s Gain Formula, Block ...
This article provides a comprehensive Control Systems techniques: Mason’s Gain Formula, Block Diagrams, and Signal Flow Graphs. Learn about the ...
This article provides a comprehensive Control Systems techniques: Mason’s Gain Formula, Block Diagrams, and Signal Flow Graphs. Learn about the pivotal role of the Transfer ...

This guide provides a thorough understanding of block diagrams in control systems. Get to know ...
This guide provides a thorough understanding of block diagrams in control systems. Get to know the essentials of transfer functions, visualizing ...
This guide provides a thorough understanding of block diagrams in control systems. Get to know the essentials of transfer functions, visualizing intermediate variables, and rules ...
The article covers a detailed understanding of transfer functions in control systems, their ...
The article covers a detailed understanding of transfer functions in control systems, their mathematical model, and their role in simplifying system ...
The article covers a detailed understanding of transfer functions in control systems, their mathematical model, and their role in simplifying system responses. It also discusses ...

A tutorial focused on XCOS, a tool in Scilab, which facilitates understanding and developing ...
A tutorial focused on XCOS, a tool in Scilab, which facilitates understanding and developing of dynamic control systems via straightforward block ...
A tutorial focused on XCOS, a tool in Scilab, which facilitates understanding and developing of dynamic control systems via straightforward block diagrams, supplemented by a ...
- 1
- 2

Freshly launched content! We'll be adding more on a regular basis.
Question, comment or suggestion?



